ربات های صنعتی
ربات صنعتی یک دستگاه خودکارساز است که به جای انسان کار های خطرناک، وقتگیر و سخت را انجام می دهند. آنچه در ادامه می پردازیم:
الف) ربات های صنعتی چیست ؟
ب) تاریخچه ربات صنعتی
ج) برند های مطرح دنیا
د) انواع ربات های صنعتی

ربات صنعتی چیست ؟
ربات های صنعتی سیستمی ماشینی است که توسط کامپیوتر برنامه نویسی شده و قابل برنامه ریزی هستند.
ربات ها باتوجه به نوع و برنامه پذیری آن ها در ابعاد مختلف از جمله نانو تا ابعاد بزرگ در کارخانه یافت می شوند.
در سال 1954 جورج دوول اولین بار برای ربات صنعت ثبت اختراع کرد. در سال 1969 ویکتور شنمن در دانشگاه اسنفورد اولین ربات شش محور را اختراع نمود.
در سال 1970 ربات ها وارد عرصه صنعتی شدند و شرکت های آمریکایی و اروپایی وارد این حوضه شدند و ربات های خود را به بازار عرضه کردند.
برندهای مطرح ربات صنعتی


انواع ربات های صنعتی
◀ مفصلی
◀ دکارتی یا ربات خطی
◀ اسکارا SCARA
◀ استوانه ای
◀ دلتا
◀ قطبی (کروی)
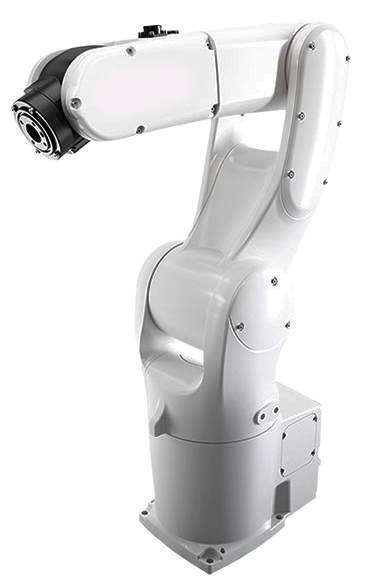
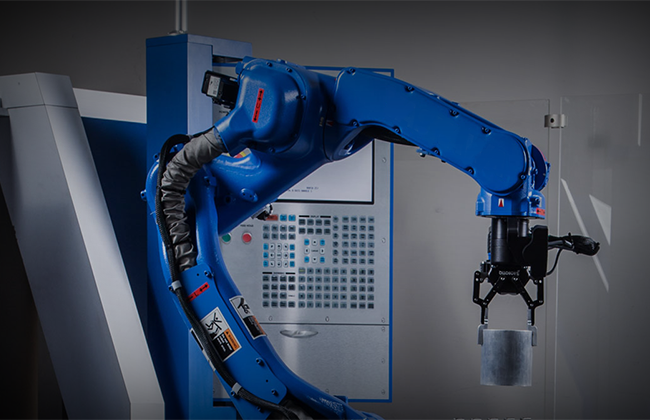
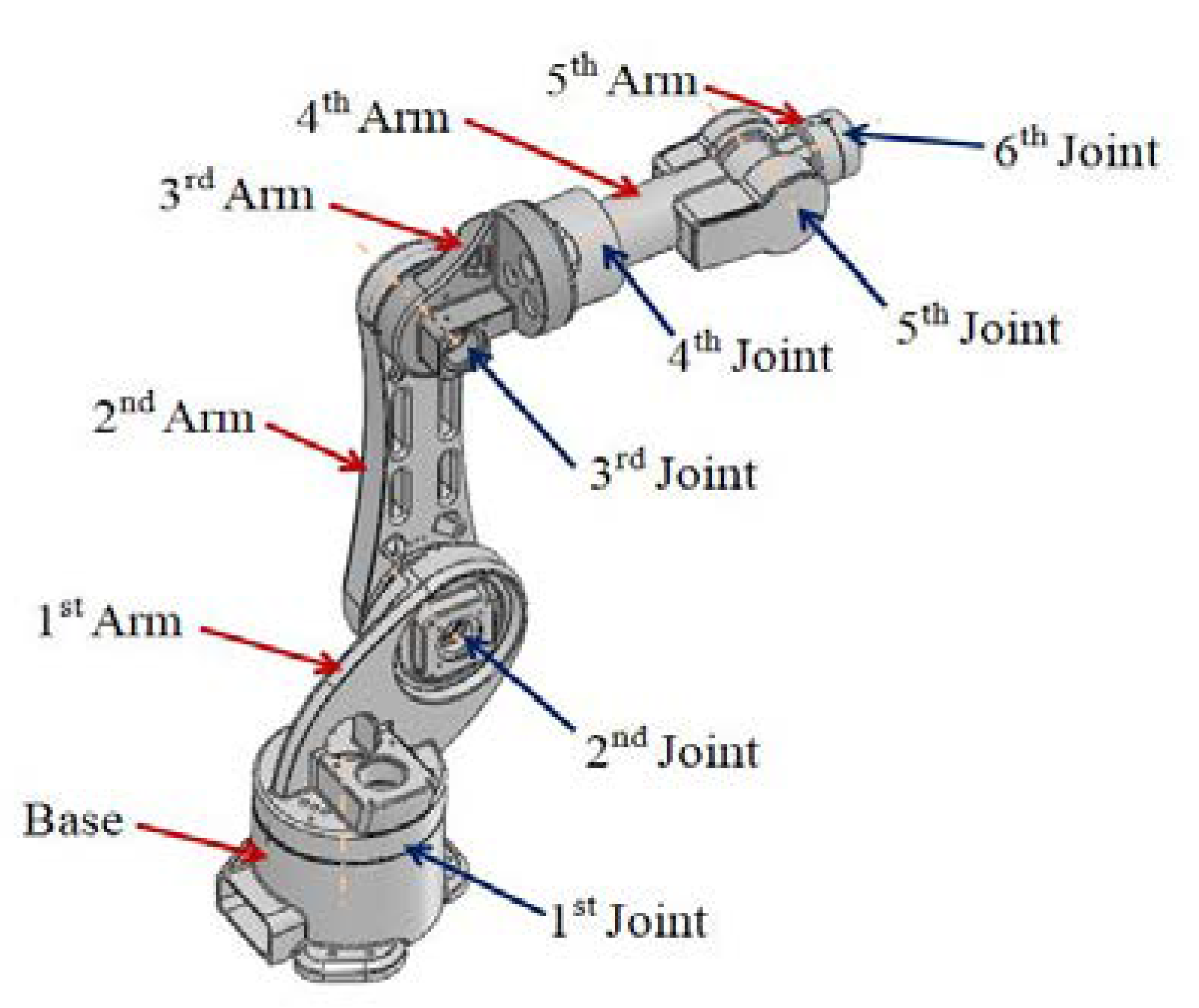
ربات مفصلی
ربات مفصلی همانند بازوی انسان عمل می کند و این امر باعث شده بخش مهمی از ساختار را در ربات های صنعتی به خود اختصاص دهد. همینطور ربات های مفصلی بیش از 50% ربات های صنعتی را شامل می شوند. ربات مفصلی بسته به نوع خود تعداد اتصلات چرخشی مفصلی متفاوتی دارد.
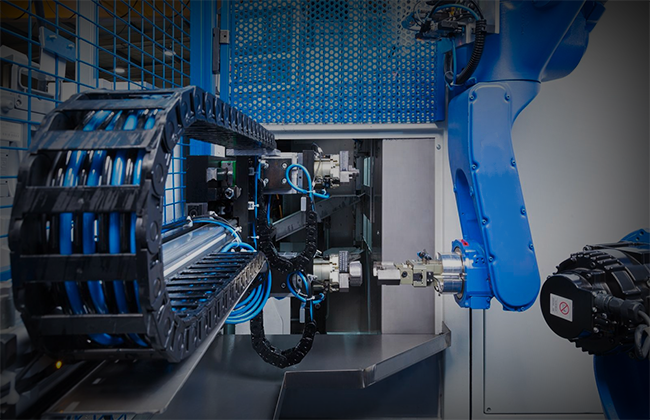
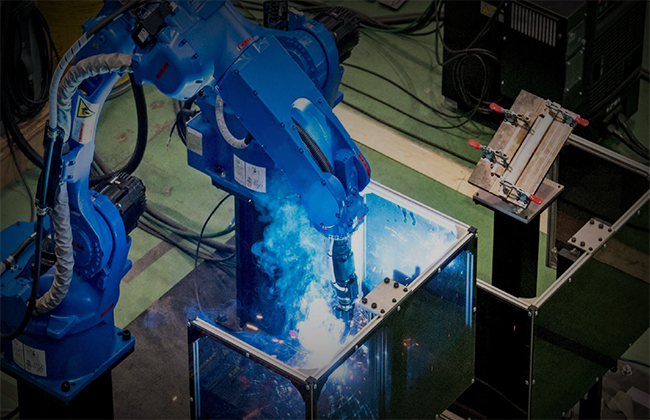
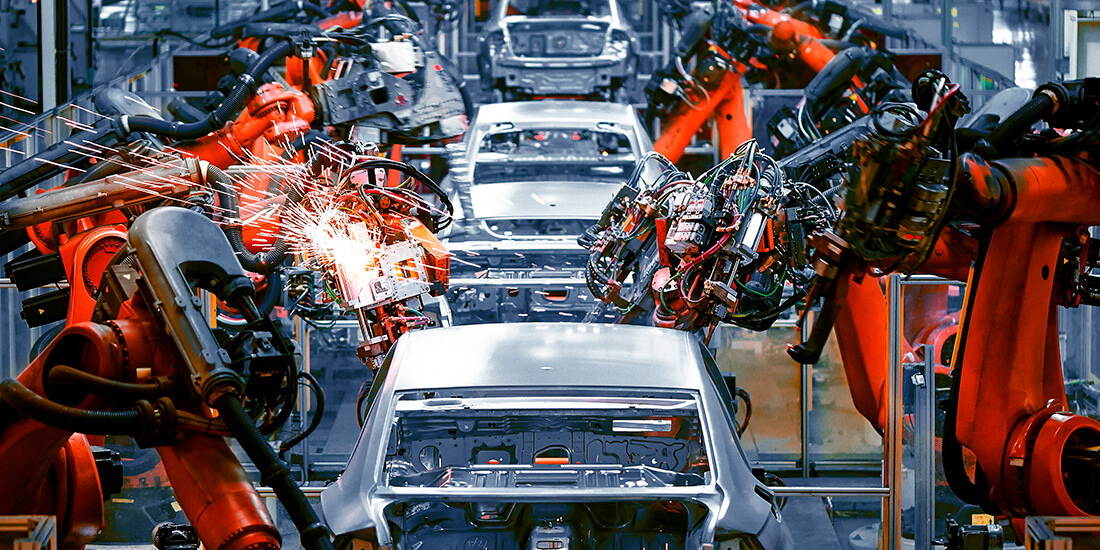
ربات مفصلی با 6 محور (بعضی از آن ها به دلیل دسترسی بهتر 7 محوره هستند) توانایی انجام کار ها را در هر جهت دلخواه دارد. این ربات ها کاربرد وسیعی در صنعت دارند و در بخش های مختلف جابجایی، جوشکاری، مونتاژ، نقاشی و ... استفاده می شوند.

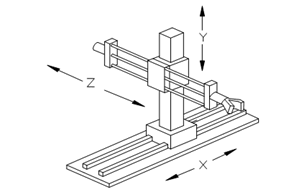
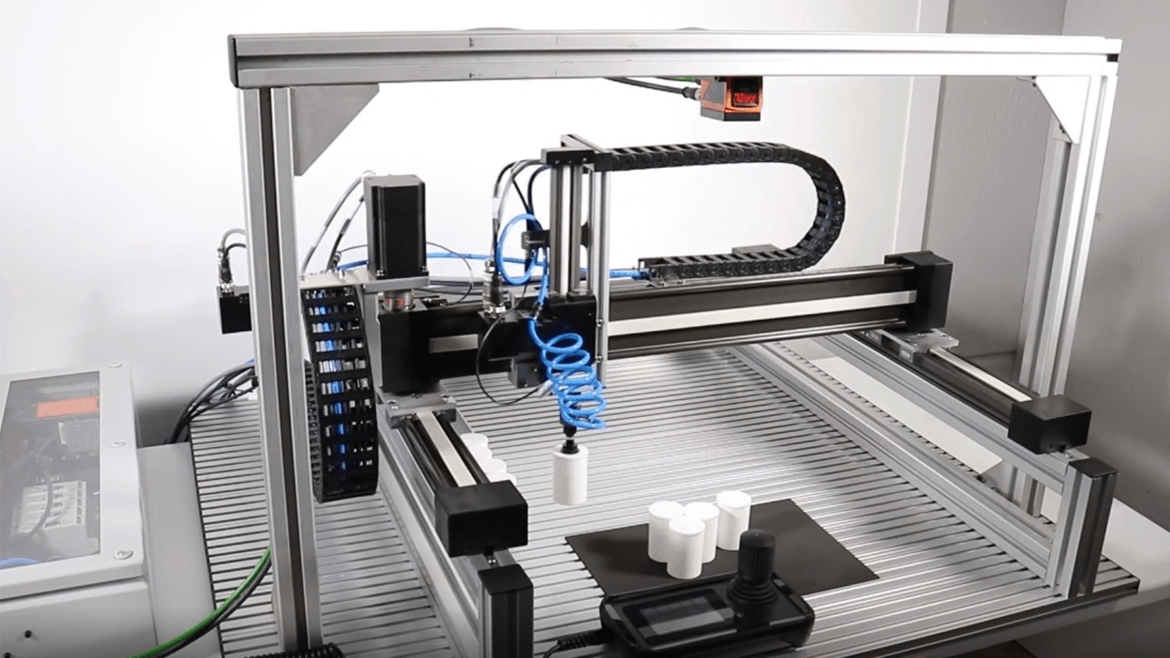
ربات خطی (دکارتی)
ربات های خطی (دکارتی، کارتزین، گانتری) دومین ربات رایج در بین ربات های صنعتی است. این ربات ها شامل سه محور x,y,z هستند که حرکت محور ها به صورت خطی می باشد.
از کاربرد های مهم ربات خطی می توان به دستگاه های cnc مانند برش لیزر، پرینتر های سه بعدی و ... اشاره کرد.
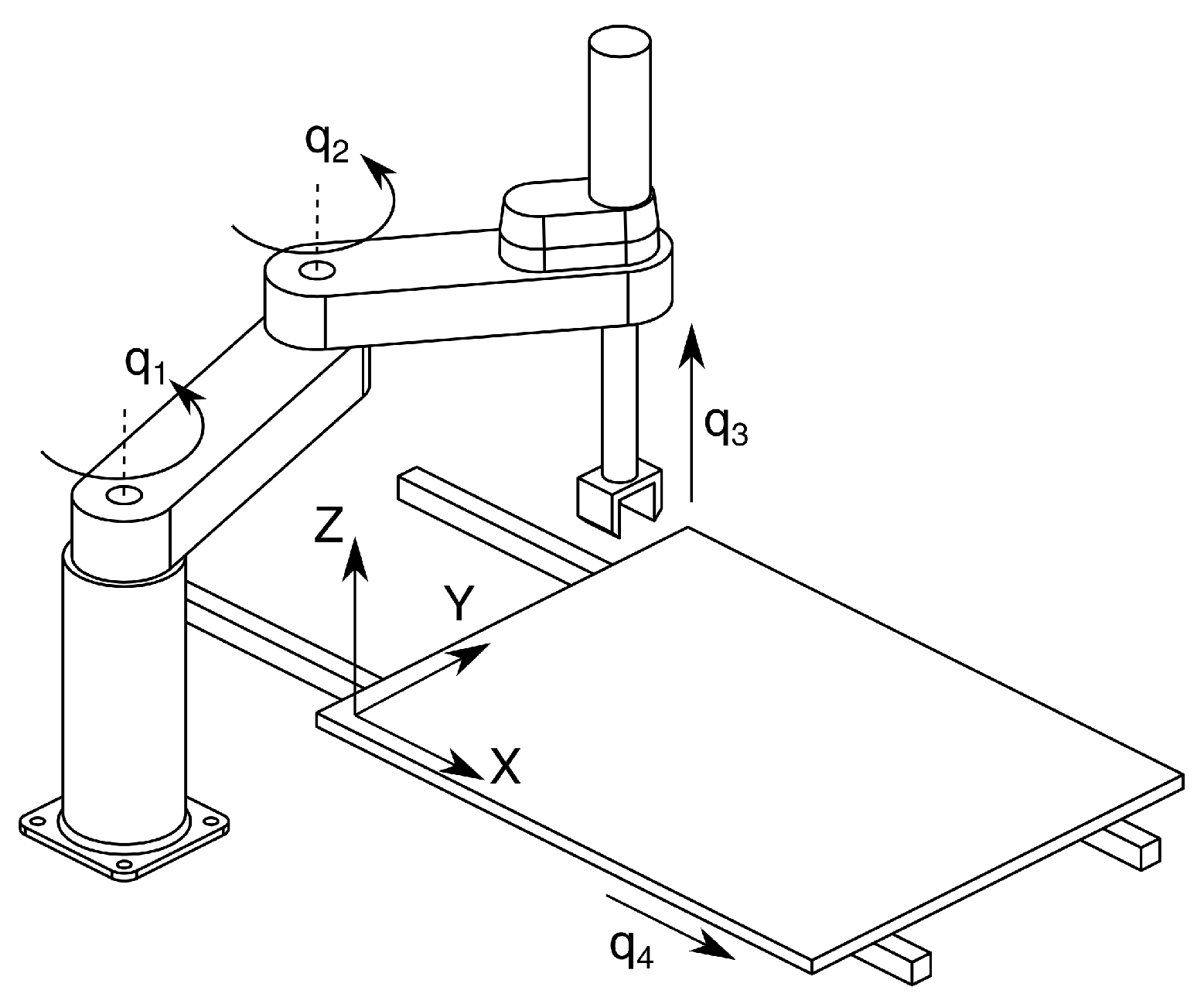
ربات اسکارا
ربات های اسکارا شامل دو مفصل دورانی و یک مفصل خطی است. ساختار دو مفصل دورانی باعث شده تا این ربات در محیطی کم، سرعت بیشتری داشته باشد. همین امر سبب شده تا ربات های اسکارا نقش مهمی را در خط مونتاژ داشته باشند.


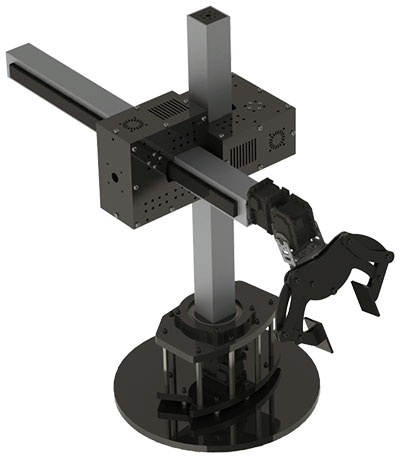
ربات استوانه ای
ربات استوانه ای از محور های خطی و چرخشی تشکیل شده که محور مختصات آن مانند استوانه است. این ربات ها با یک محور پایه چرخشی با اتصال به محور خطی (افقی و عمودی) و در انتها یک یا چند محور چرخشی ساخته شده است.
بازوی اصلی این ربات به دو جهت بالا و پایین حرکت می کند. با طراحی انتهای بازو، کار ها سریع و بهینه انجام می گردد.
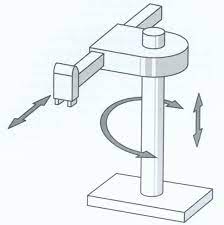
از کاربرد های این ربات می توان به مونتاژ ابزار های ماشینی، جمع آوری مواد و کار های ساده دیگر اشاره کرد.

ربات دلتا
ربات دلتا (موازی) از سه بازوی موازی متصل به یک پایه مشترک ساخته شده است. ربات دلتا دارای سه درجه آزادی و حداکثر ظرفیت بار آن ها تا 5 کیلو (برخی تا 8 کیلو) است. طراحی این ربات ها به گونه ای است که فقط در سقف نصب می شوند.
ربات دلتا در کار های صنعتی، آموزشی و پژوهشی کاربرد دارد.



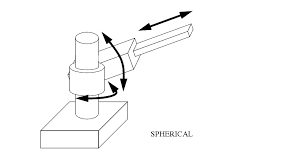
ربات قطبی (کروی)
ربات های قطبی ساختاری شبیه به استوانه ای دارند . ابتدا یک مفصل چرخشی که بازو را به پایه وصل می کند و مفاصل بعدی که دو مفصل چرخشی و یکی خطی به هم متصل می شوند. این ربات ها بسیار انعطاف پذیر بوده و می توانند دور تا دور خود را به محیط کاری تبدیل کند.
ربات های قطبی بسیار محدود اند و کاربران بر اساس نیازشان از این ربات ها استفاده می کنند.